チャットでご相談ください。

|
|
コーナーの先や障害物背後にある物体の画像を取得 |
|
|
隠れた標的の3Dモデルを再現するのにそこから戻ってくる散乱光を使用 |
|
|
隠れた標的近くにある物体で散乱するレーザー光が関与 |
|
|
自律走行車、公衆衛生、医用画像に多くの潜在的メリット |
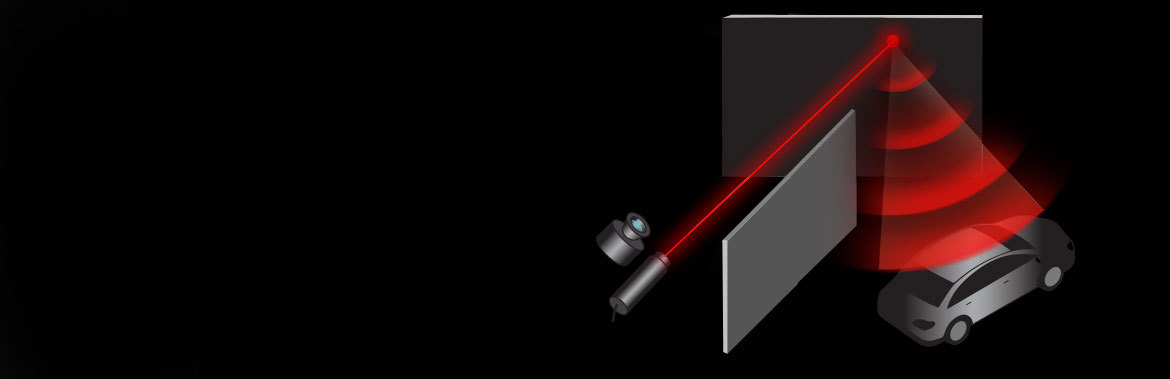
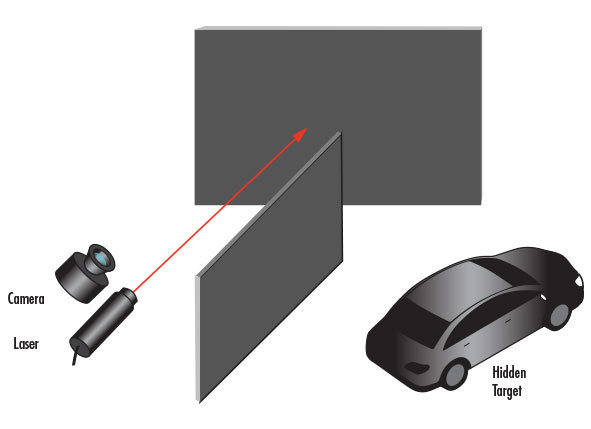
天文学における重力レンズ作用によって曲げられる光などの極端な例を除けば、どんなイメージングアプリケーションでも物体とカメラ (もしくはディテクター) 間を直線上に配置する必要があります。イメージングアプリケーションの大部分は、直線上に伝播する光の使用に限定されます。しかしながら、最先端の研究によってコーナーの先や障害物背後の画像化の可能性が広がりつつあり、この概念も変わり始めています。障害物の背後に隠れた物体は、レーザー、高感度カメラ、そしてコンピューターによる再構成法の組み合わせを用い、その物体の周辺で光を散乱させることで検出可能になります。
非視線方向イメージング法は、レーザーパルスを物体に向けて送り、物体から戻ってくる散乱光の飛行時間を利用して物体とディテクター間の距離を測定するLiDAR (光検出と測距) のそれに類似しています。しかしながら非視線方向イメージングでは、このプロセスにもう1つ別の散乱を加えることで、障害物に遮られた物体 (標的) を画像化します。1
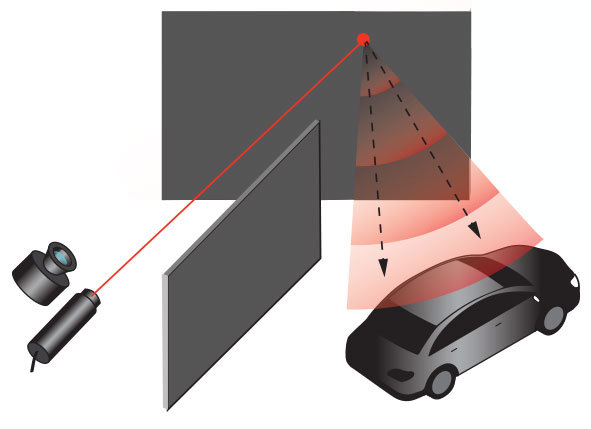
ピコ秒やフェムト秒の光の伝播をリアルタイムで測定するためには、単一光子アバランシェフォトダイオードカメラアレイなどの高感度カメラが必要です。このディテクターは二つの異なるリターン信号を受け取ります。光が直接壁に当たって散乱した時の最初の信号と、光が標的に当たって散乱した時の二番目の信号です。非視線方向イメージングには、この二番目の信号が使われます。この信号の飛行時間の情報を用いて隠れた標的上の特定ポイントで全て重なり合ういくつもの楕円体が再現され、コンピューターのソフトウェアがカメラと隠れた標的間の距離を計算してその3Dモデルを再構成します。
3Dの物体は、光を散乱するいくつもの独立したポイントの集合体に分解できます。これらのポイント全ての総和によって、元の物体のモデルを再現することができます。ディテクターが100psの時間的分解能で戻り光のパルスを識別できるのであれば、これは隠れた標的では約1.5cmの空間分解能に相当します。1


曲がり角の先にいる車や歩行者が直接視界に入る前に、車がそれを検知することが可能になります。2

警察、消防、救急医療サービスなどが、危険な状況にある人々の状態を安全な距離から検知することが可能になります。2
システムの視線に直接入らない、隠れた小さな3D構造を調べることができます。2
この新しい技術を用いて、携帯可能で、観察者の目に危険を及ぼすことなく現実世界で利用可能な実用製品を作ることは非常に困難です。非視線方向イメージングにとって大きな課題の一つは、ディテクターに戻る光の量が限られていることです。ディテクターは、この非常に少ない量の光を検出し、周囲にある他の光源と区別しなくてはなりません。ディテクターへのリターン信号は二つの連続した散乱の結果のため、損失は非常に大きくなります。1レーザーパルス当たりのリターン信号は、僅か1光子分の少なさになる可能性があります。1
しかしながら、米国スタンフォード大学のComputational Imaging Lab は、間接太陽光の下、屋外でも機能する非視線方向イメージングシステムを開発しました。2 彼らは、壁に遮られた再帰反射テープで作られた物体の画像取得に成功しました。これは、この技術の未来にとって幸先のよいスタートです。
米国セントラルフロリダ大学のAristide Dogariu研究所は、壁とその背後にある標的に当たって散乱するレーザー光の代わりに、その壁に当たる光の空間コヒーレンスを利用する非視線方向イメージングを研究しています。3 この研究は、超短パルスレーザー照明を必要とせずに、隠れた標的のモデリングを行える可能性を示すもので、この技術の現実世界でのアプリケーションがよりポータブルで使いやすいものになります。
非視線方向イメージング技術が実用的な商用システムとして利用可能になるまで更に多くの開発が必要ですが、次世代のイメージングアプリケーションにとって期待が寄せられるソリューションです。
参考文献1. Faccio, Daniele. “Non-Line-of-Sight Imaging.” Optics and Photonics News, vol. 30, no. 1, Jan. 2019, pp. 36–43.
2. M. O’Toole, D.B. Lindell, G. Wetzstein, “Confocal Non-Line-of-Sight Imaging Based on the Light-Cone Transform”, Nature, 2018.
3. Batarseh, M., et al. “Passive Sensing around the Corner Using Spatial Coherence.” Nature Communications, vol. 9, no. 1, 2018, doi:10.1038/s41467-018-05985-w.
 EOは非視線方向イメージング用のフルシステムを販売している?
壁で最初に散乱するレーザー光が隠れた標的で散乱する光を圧倒しない?
EOは非視線方向イメージング用のフルシステムを販売している?
壁で最初に散乱するレーザー光が隠れた標的で散乱する光を圧倒しない?
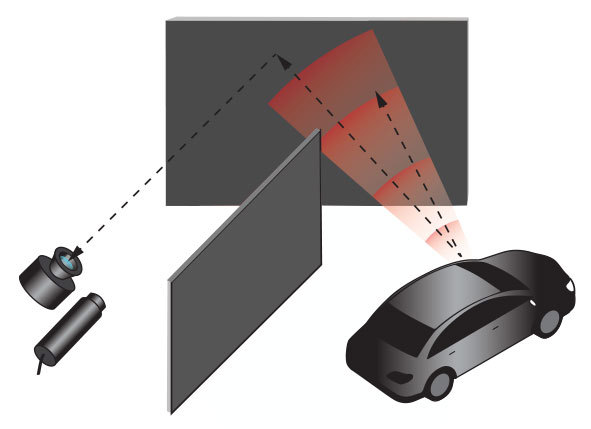
壁で直接散乱する光は、物体で間接的に起きる二番目の散乱光よりも遥かに強力です。しかし、両者間には時間遅延があるため、時間的分解能が十分に高い高感度ディテクターが二つの信号を区別することができます。2
隠れた標的からの二番目の散乱の時間遅延を検知した後、ソフトウェアはどのようにその物体の3Dモデルを再現する?
ソフトウェアは、まず3Dの時空間的ボリュームで全ての測定値を保存します。その後、時間軸に沿って測定値を再サンプリングし、その結果に対して逆フィルターを用いて周波数領域で畳み込みを行います。そして深さ軸に沿って再サンプリングを行い、隠れた物体を復元します。2
データ取得後、隠れた標的の3Dモデルの再現にはどのくらいの時間がかかる?
スタンフォード大学の Computational Imaging Lab の非視線方向イメージング法では、3Dモデルの作成に僅か0.5秒しかかかりません。2


















もしくは 現地オフィス一覧をご覧ください
クイック見積りツール
商品コードを入力して開始しましょう
Copyright 2023, エドモンド・オプティクス・ジャパン株式会社
[東京オフィス] 〒113-0021 東京都文京区本駒込2-29-24 パシフィックスクエア千石 4F
[秋田工場] 〒012-0801 秋田県湯沢市岩崎字壇ノ上3番地